
Paranoid Android is a PC game we created, in which the player should escape moving obstacles and reach an exit zone across the game board. The game was created as a project in the workshop on Algorithms for robot motion planning, Spring 2018.
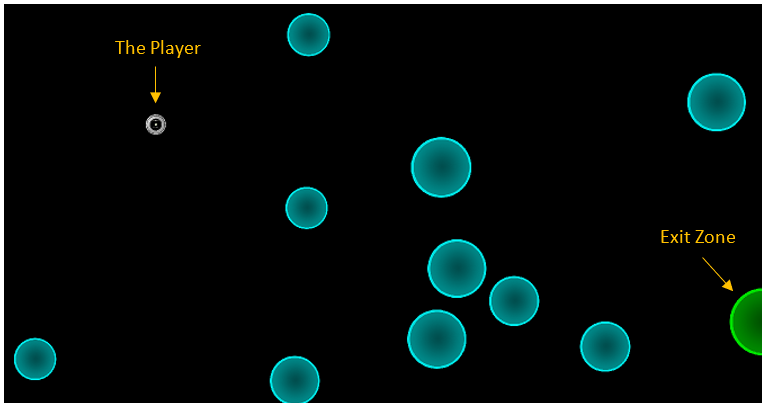
The game board is a 2D rectangle with moving objects in different sizes and speeds. The player mission is to escape all those moving obstacles while crossing the board from side to side and reach the exit zone (in green) without touching the obstacles. The player should complete the mission in the fastest time possible.
When PC SIMULATION mode is chosen, the parameters of a new game (player starting point, exit zone location, obstacles locations and speeds at time t=0) are set, and our planner trying to find a short valid path for the player from the starting point to the exit zone. The output of the planner is a list of control inputs for the player, which describe the direction and speed for every part of the path.
In PC SIMULATION mode, the game is displayed with an automatic PC player moving by the control inputs received from the planner.
Paranoid Android also supports PC VS USER mode where one player is moved by the PC and a second player is controlled by the user in real-time. However, the PC usually solves the game so quickly that a human player can only lose for it.