PhD student in the School of Computer Science, Tel Aviv University
Advisor: Prof. Dan Halperin
Member of the Computational Geometry Lab
Research Interests
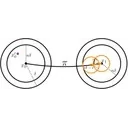
- Sampling-based algorithms for motion planning
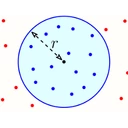
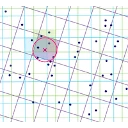
- Nearest-neighbor search algorithms
- Computational geometry
Publications
[dblp]
- Michal Kleinbort, Kiril Solovey, Zakary Littlefield, Kostas E. Bekris, Dan Halperin
Probabilistic Completeness of RRT for Geometric and Kinodynamic Planning With Forward Propagation.
IEEE Robotics and Automation Letters, 2019 [link]
In IEEE International Conference on Robotics and Automation (ICRA), 2019. - Kiril Solovey, Michal Kleinbort
The Critical Radius in Sampling-based Motion Planning.
International Journal on Robotics Research, special issue (invited), to appear,
In Robotics: Science and Systems (RSS), , 2018 [link]. - Michal Kleinbort, Oren Salzman and Dan Halperin
Collision detection or nearest-neighbor search? On the computational bottleneck in sampling- based motion planning.
In Workshop on the Algorithmic Foundations of Robotics (WAFR), San Francisco, CA, USA, 2016 [link]. - Michael Hemmer, Michal Kleinbort and Dan Halperin
Optimal randomized incremental construction for guaranteed logarithmic planar point loca- tion.
Computational Geometry Theory and Applications (CGTA), , 2016 [link]. - Michal Kleinbort, Oren Salzman and Dan Halperin
Efficient high-quality motion planning by fast all-pairs r-nearest-neighbors.
In IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 2015 [link]. - Michael Hemmer, Michal Kleinbort and Dan Halperin
Improved Implementation of Point Location in General Two-Dimensional Subdivisions.
In European Symposium on Algorithms (ESA), Ljubljana, Slovenia, 2012 [link]. - Michal Kleinbort
Guaranteed Logarithmic-Time Point Location in General Two-Dimensional Subdivisions: New Bounds, Algorithms, and Implementation [pdf]
Master’s thesis, Tel Aviv University, February 2013
Advisor: Prof. Dan Halperin.
Teaching
- CS1001.py: Extended Introduction to CS [link]
- General Introduction to Programming